SES-V2 Legged Robots
SES-V2 Legged Robot
Using Smart Servo Motors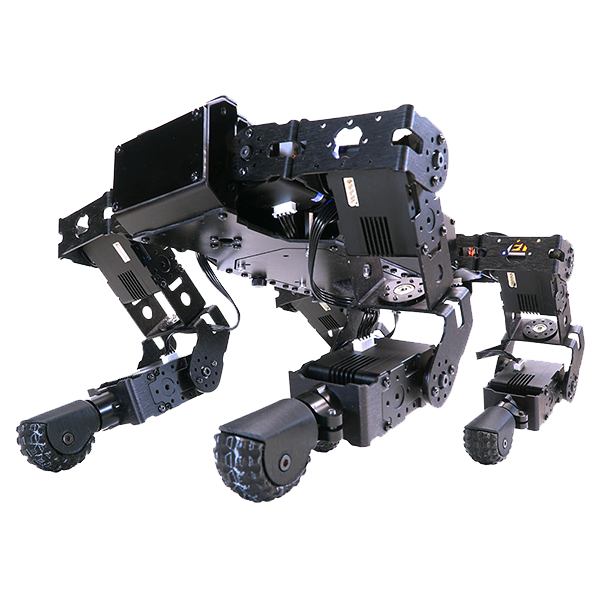
SES-V2 LEGGED ROBOTS DETAILS
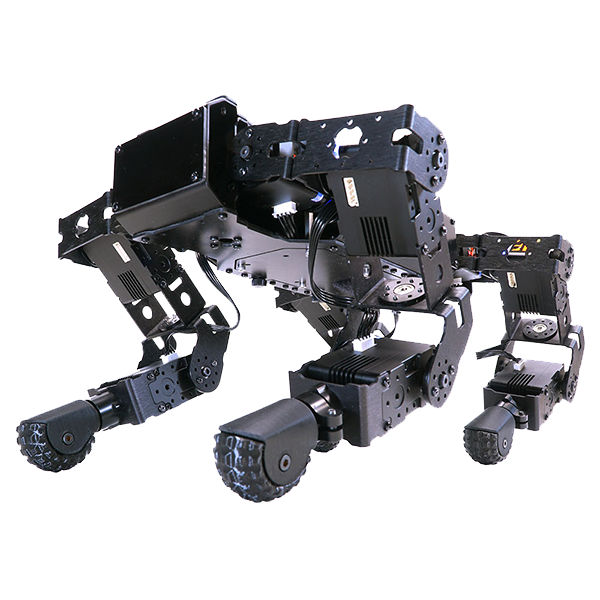
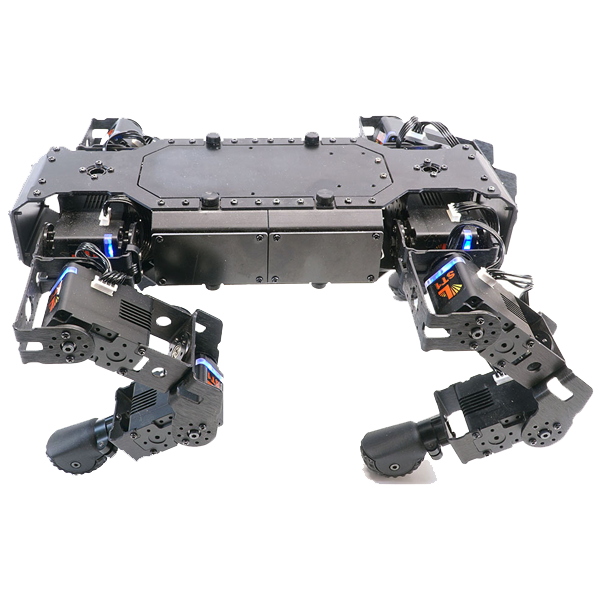
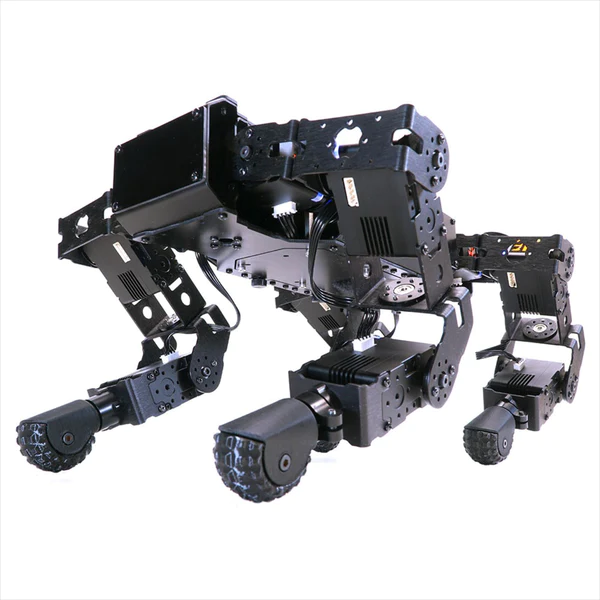
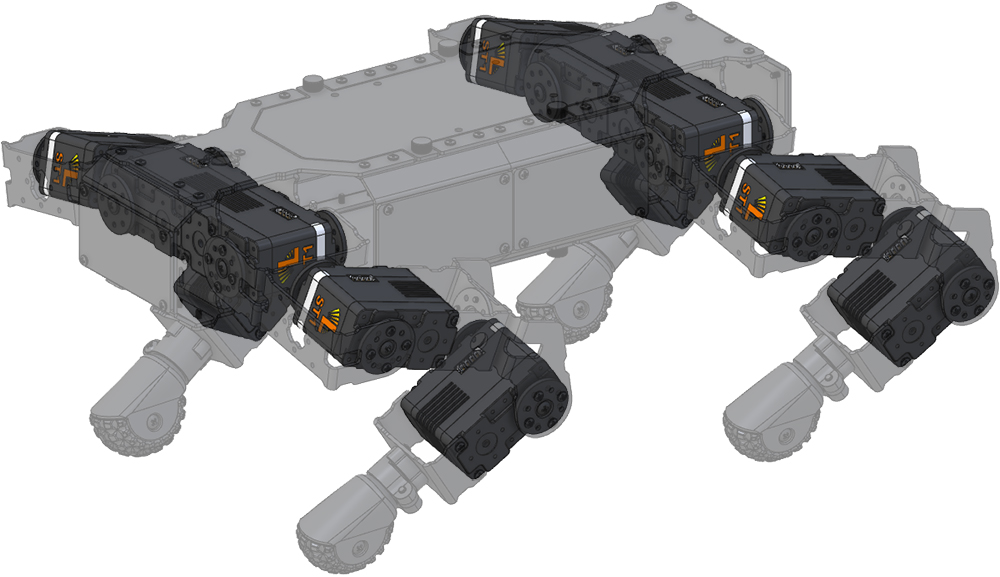
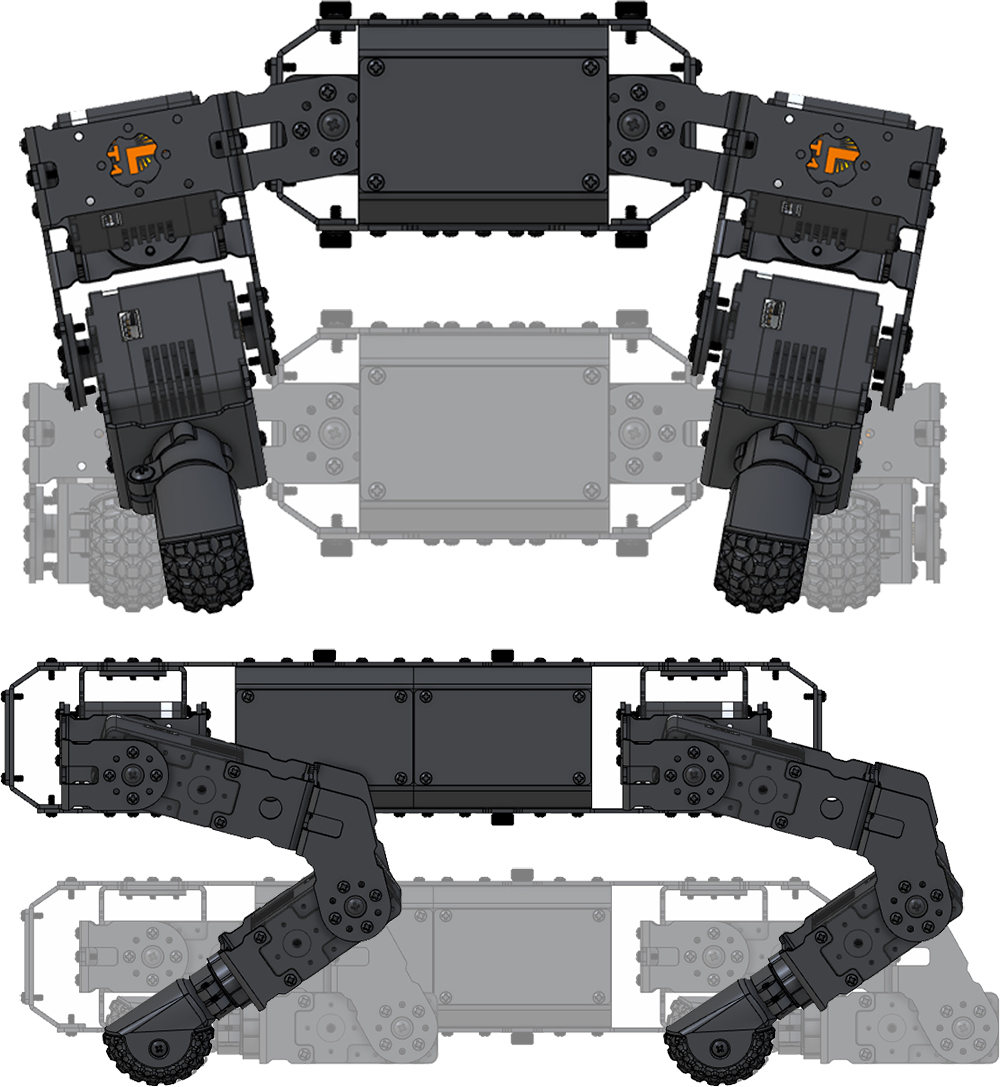
The Lynxmotion (LSS) – mechDOG Quadrapod was created as a collaboration with MechDickel (RobotShop Community) to create a four-legged quadrapod (“quadruped being the animal equivalent) robot with similar degrees of freedom to a mammal. ST1 modular servos are used throughout, along with a variety of Lynxmotion Servo Erector Set (SES) V2 brackets. The body plates are made of composite G10 and the body side panels are anodized aluminum. The LSS Adapter acts to split battery power to each leg, and can be used with either an Arduino shield-compatible microcontroller or single board computer (SBC) like the Raspberry Pi. The internal compartment can be quickly accessed using thumbscrews at the top. There are mounting points at the top for accessories like YDLidar’s 360 degree laser scanner or other SES V2 brackets. The size of the robot and built-in functionality of the smart servos make it ideally suited as an inexpensive development platform onto which a variety of sensors can be mounted and used for autonomous behaviors, navigation and more.
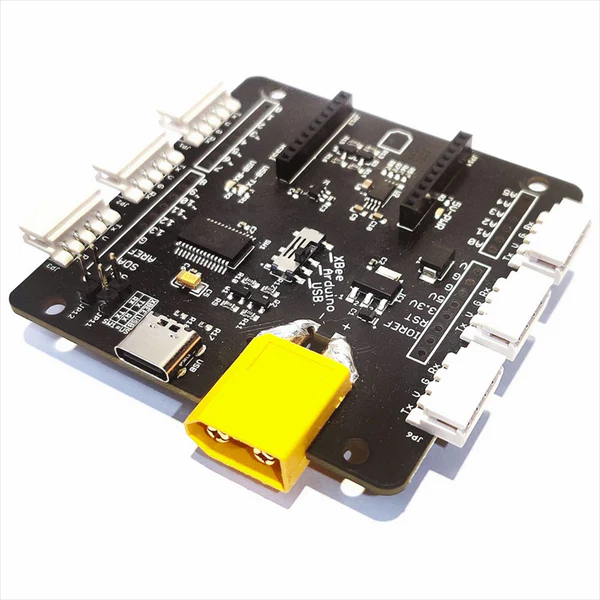
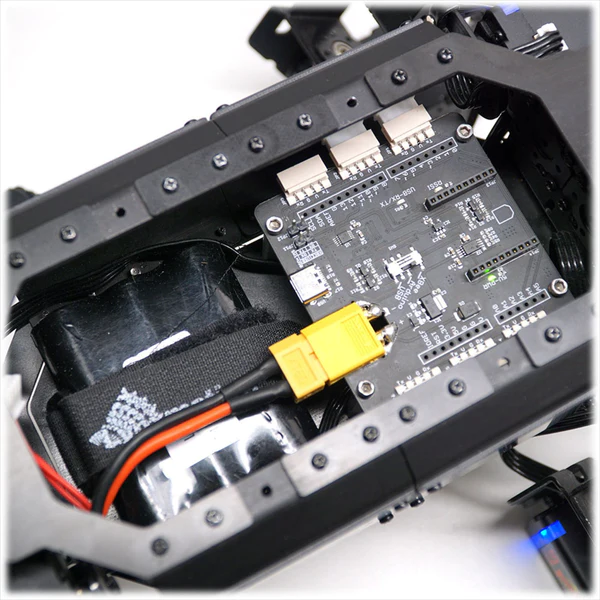
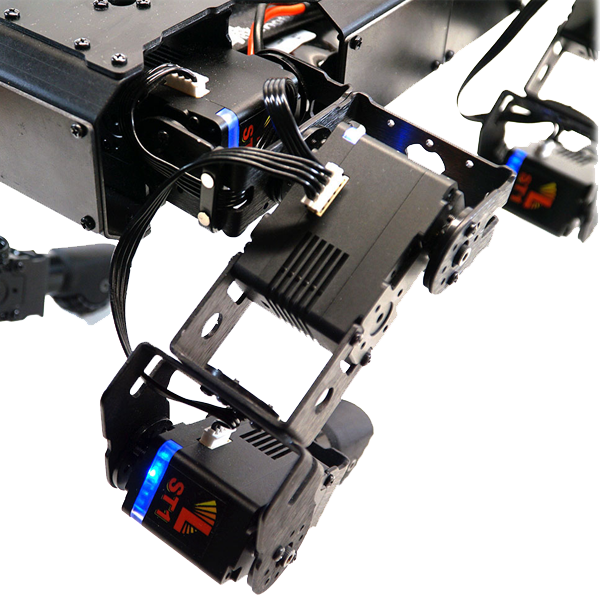
Lynxmotion ST1 modular smart servos are used throughout, along with a variety of Lynxmotion Servo Erector Set (SES) V2 brackets. The body plates are made of composite G10 and the body side panels are anodized aluminum. The included LSS Adapter acts to split battery power and communication to each leg, and can be used with either an Arduino shield-compatible microcontroller (ex. Arduino Uno or Lynxmotion BotBoarduino) or single board computer (SBC) like the Raspberry Pi 3 or 4 (note that to power a Raspberry Pi from the same battery as the robot, we suggest using the LSS-5VR module, sold separately).
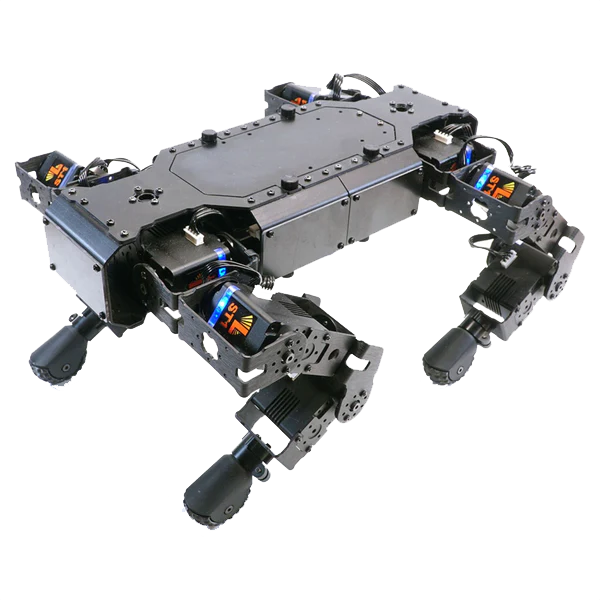
The internal compartment can be quickly accessed using thumbscrews to remove the top plate of the robot. There are also mounting points on the top plate for accessories like YDLidar’s X2 360 degree laser scanner or other SES V2 brackets (to add a pan/tilt or simple robotic arm). The size of the robot and built-in functionality of the smart servos make it ideally suited as a quadrapod 12DoF legged development platform onto which a variety of sensors can be mounted and used for autonomous behaviors, navigation and more.
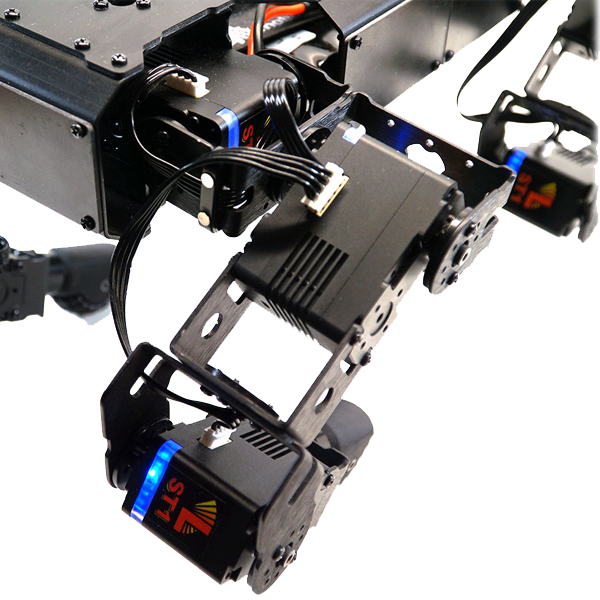
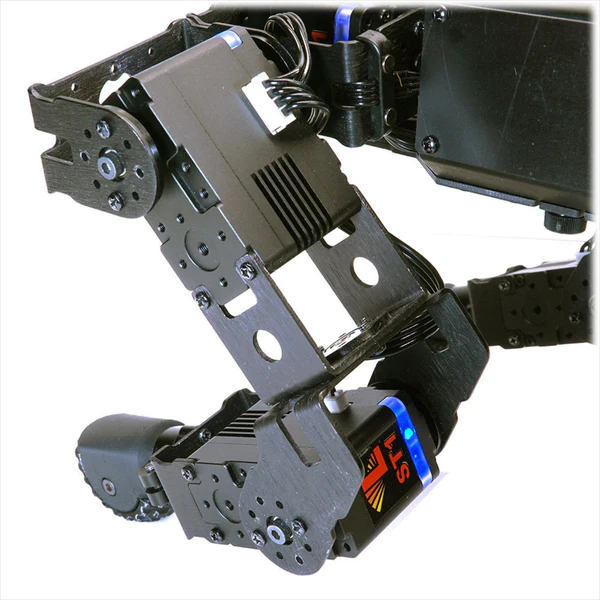
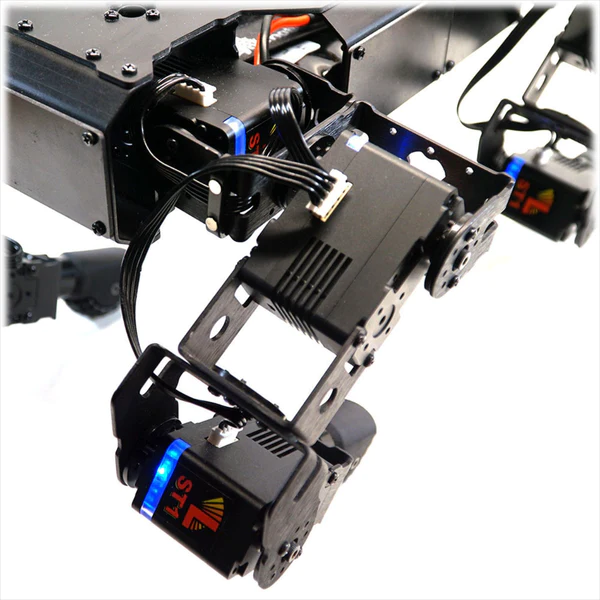
Incorporating Lynxmotion’s Smart Servo Motors (rather than small 9g RC servos commonly used in small tabletop quadrapods, or BLDC motors for larger quadrapods) gives the developer significant control over and feedback from the servos. Possible configurations of each servo include angular range, center position, direction, speed, LED color, operating mode (serial vs. RC) and more. Feedback per servo (in serial mode) includes but is not limited to: absolute angular positioning, voltage, current, speed, temperature, servo status. The servos use a “human readable” communication protocol, making them very easy to use and understand. Arduino, Python and ROS libraries are available for the servos.
SMART SERVO MOTORSModular, versatile and high quality servos | Lynxmotion’s new lineup of smart servo motors use a human readable communication protocol to send action commands, query servo values and change configurations. All three servos use the same case which includes many mounting points, an LED bar and button input and were designed from the ground up for use in complex robots. |
EDUCATION & RESEARCHHigh schools, colleges, researchers and hobbyists | This small sized quadrapod includes enough sample code to make it fun and interactive via RC handheld remote control, but rather than being a toy, it is intended for higher level education and research institutions. Add a single board computer, complex sensors and make use of the feedback from the servos to create a highly intelligent autonomous legged robot. |
QUALITY PARTSDurable yet lightweight metals and composites | Most parts used in the arms are made from either black anodized aluminum, durable G10 composite or black carbon fiber. All hardware is metal. The smart servo case, which is intended to be part of the structure, is anodized aluminum and all servos use metal gears with a dual ball bearing supported output shaft. |
FEATURED CAMERA
Modular, versatile and high quality servos
Lynxmotion’s new lineup of smart servo motors use a human readable communication protocol to send action commands, query servo values and change configurations. All three servos use the same case which includes many mounting points, an LED bar and button input and were designed from the ground up for use in complex robots.
EDUCATION & RESEARCH
High schools, colleges, researchers and hobbyists
\This small sized quadrapod includes enough sample code to make it fun and interactive via RC handheld remote control, but rather than being a toy, it is intended for higher level education and research institutions. Add a single board computer, complex sensors and make use of the feedback from the servos to create a highly intelligent autonomous legged robot.
QUALITY PARTS
Durable yet lightweight metals and composites
\Most parts used in the arms are made from either black anodized aluminum, durable G10 composite or black carbon fiber. All hardware is metal. The smart servo case, which is intended to be part of the structure, is anodized aluminum and all servos use metal gears with a dual ball bearing supported output shaft.
OTHER INFORMATION
Assembly Guide
Take a look at the assembly guide for the mechDOG quadrapod robot or the assembly guide for insect-like 3DoF Leg
Sample Code
Find sample programs and code designed for these second generation arms
Electronics Guides
Find links to user guides and manuals for the electronics and actuators used in mechDOG
3D CAD Models
Find CAD part files for parts used in mechDOG
Videos
Check out videos of our SES-V2 Legged Robot in development and in action
Images
Various hi-res images suitable for printing as posters
PHOTOS

FEATURED PRODUCT
mechDOG (Base kit)
The mechDOG Base Kit allows customers to select their choice of electronics (microcontroller or single board computer) as well as battery & charger.

mechDOG (RC)
The mechDOG RC bundle includes everything needed to build a full, remotely controlled (RC) mechDOG. Run the Arduino sample code to experiment with a full range of motion.

HT1 Smart Servo
The Lynxmotion Smart Servo (LSS) actuator series are modular, versatile, configurable and easy to use. All metal case, gears, 360 degree motion and more.
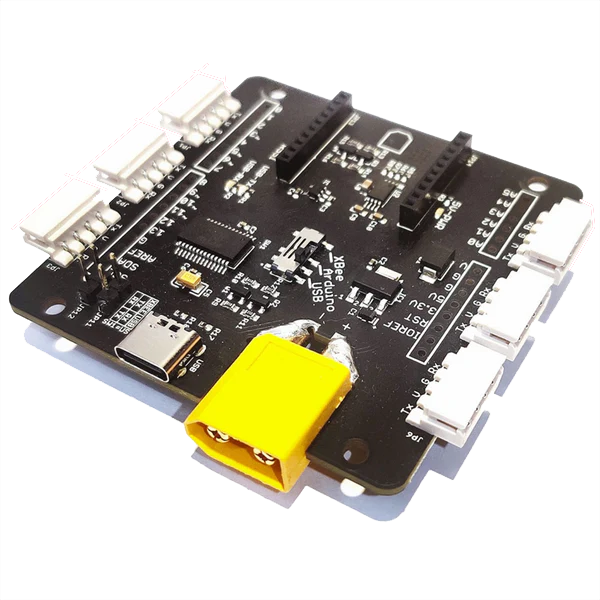
LSS Adapter
The Lynxmotion (LSS) – Adapter allows for easy connection to and control of the Lynxmotion Smart Servos. It functions as a power & communications distribution board.