A4WD1 Original Rovers
A4WD1 Original Rovers
Imagine it. Built it. Control it.TM


A4WD1 ROVER DETAILS
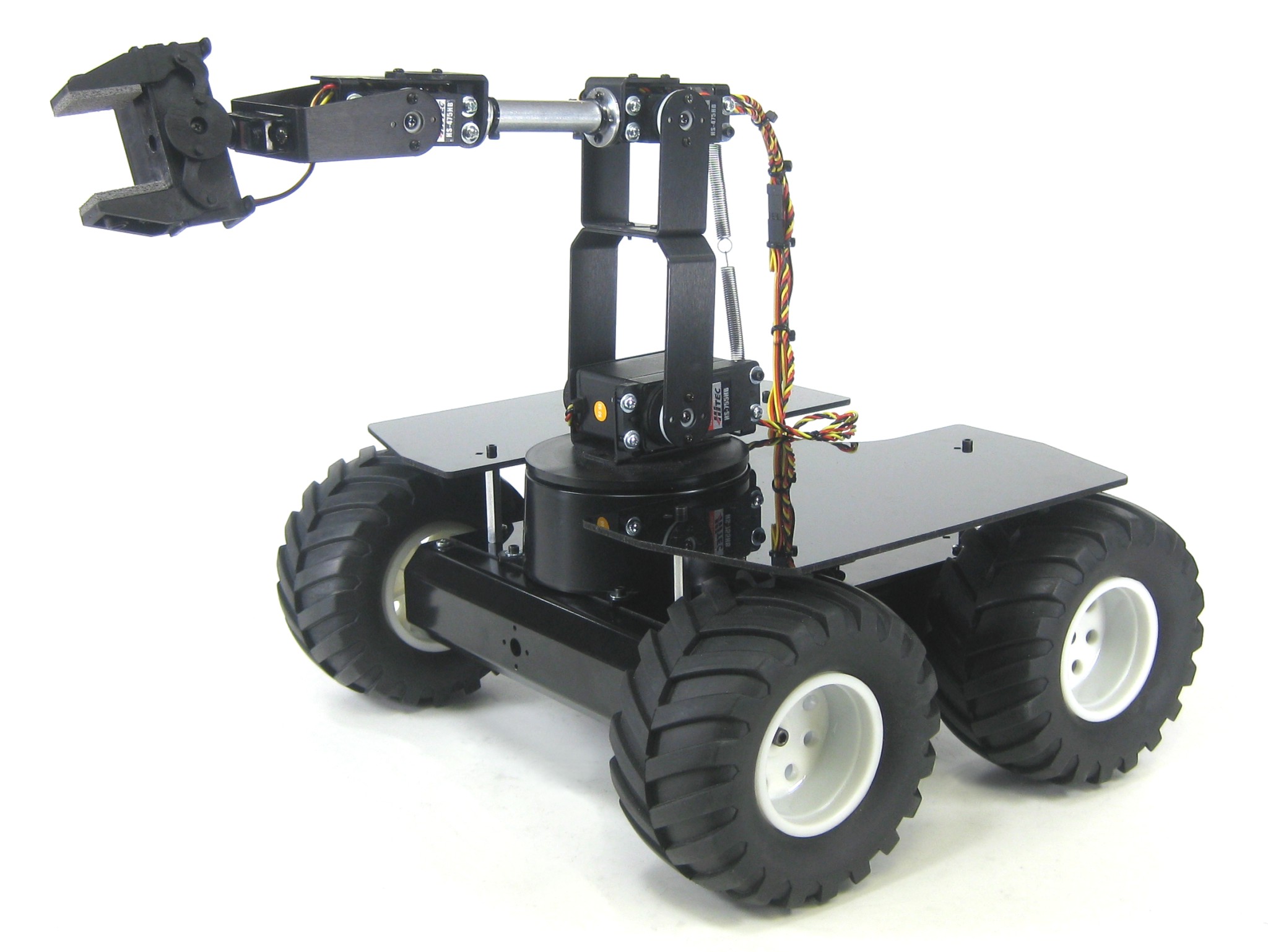
Lynxmotion offers a range of versatile wheeled and tracked rovers for education, development and hobbyist use like the A4WD1 Original Rovers. These robots have been used for anything from autonomous robotic development and SLAM indoor mapping to wildlife photography and inspection. Rovers can be made to be remotely controlled or autonomous, and Lynxmotion Servo Erector Set (SES) compatibility, which is integrated into most rovers, allows additions like a gripper, sensor mounting, pan and tilt or even a complete robotic arm to be added.
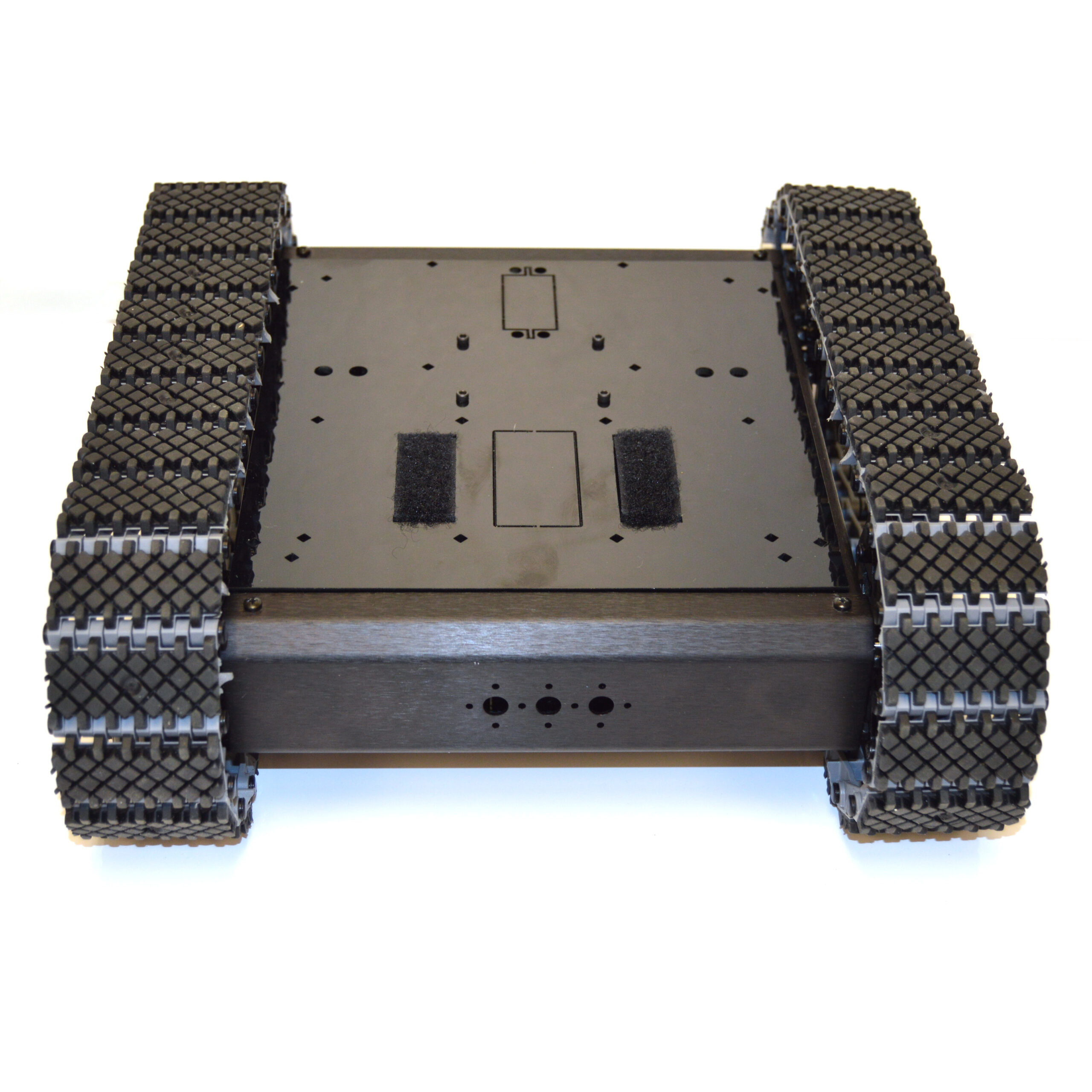
A4WD1 chassis are made using aluminum brackets as well as polycarbonate plastic making them some of the most durable on the market for their price. Partial kits are often available should users want to replace the standard motors or wheels with other compatible options In the spirit of modularity, DC gear motors, hubs, wheels and electronics are all sold separately to allow users to more easily create their own rover design. The A4WD1 MTS rover kits use the frame of the A4WD1 and replace the wheels with parts from the Modular Track System (MTS), giving it great traction and weight distribution.
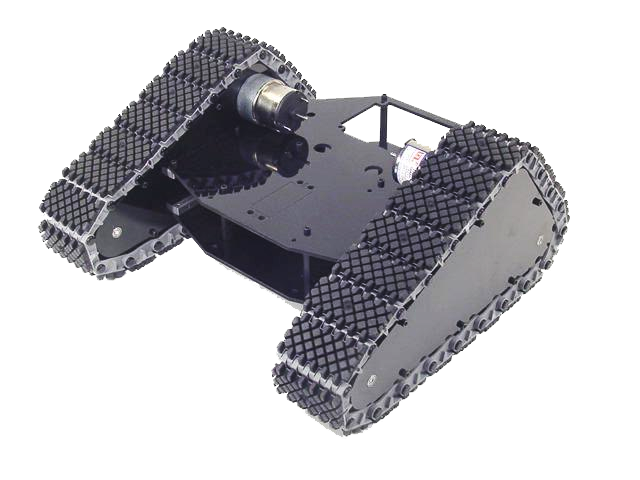
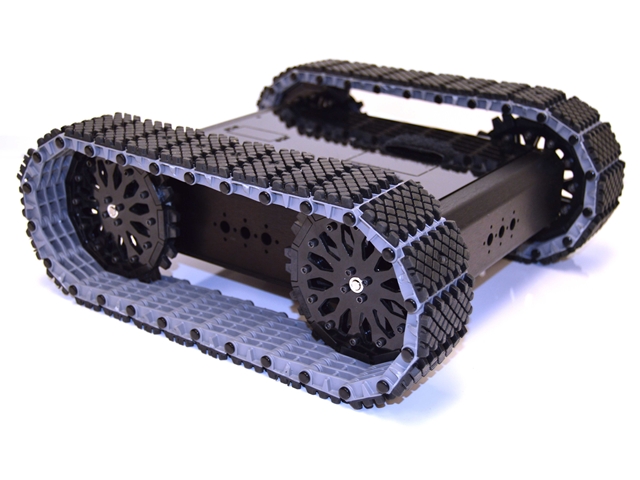
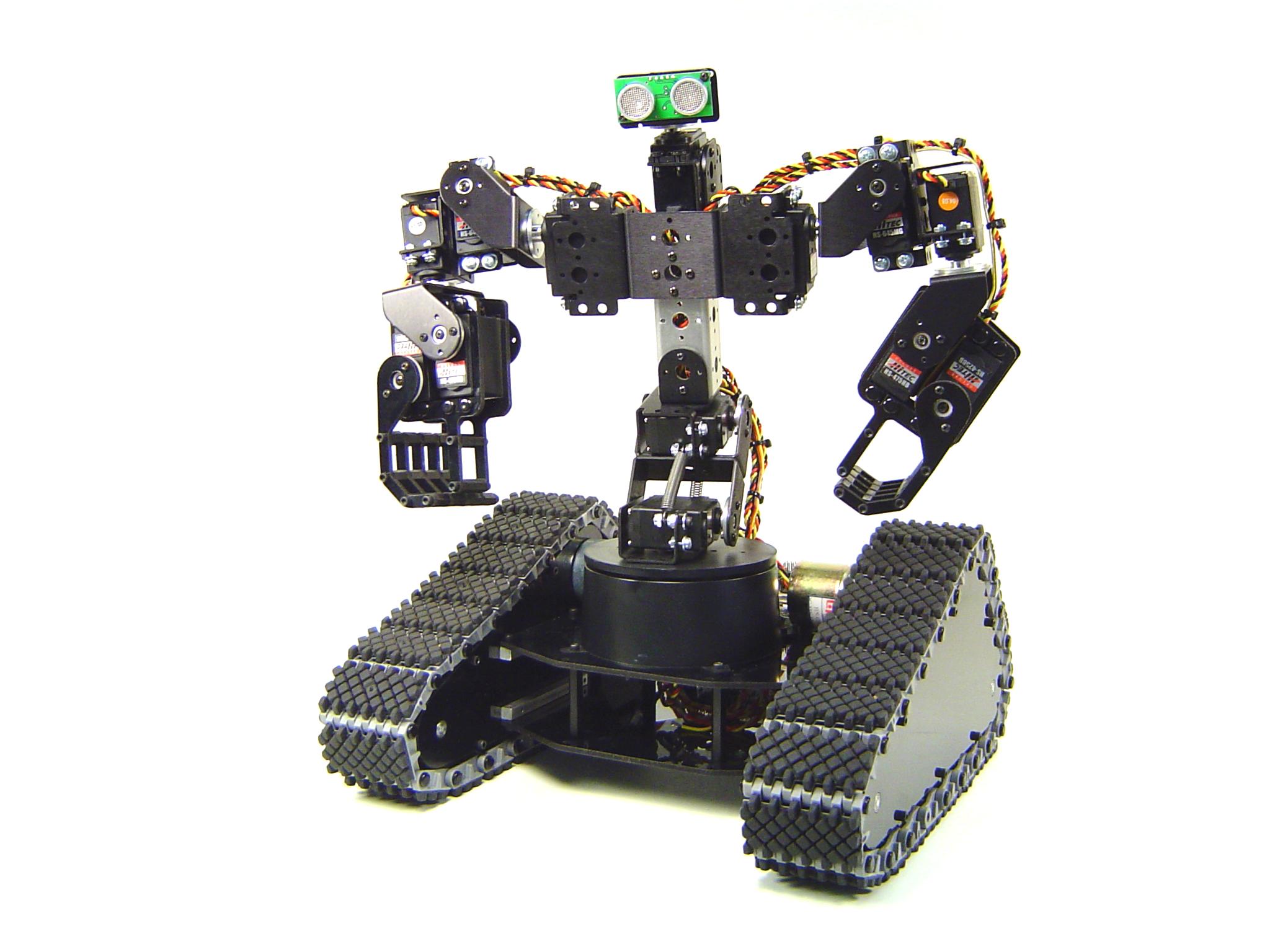
The Tri-Track rover’s chassis is made from ultra-tough laser-cut Lexan structural components, custom aluminum brackets and the Modular Track System (MTS). By utilizing heavy duty polypropylene and rubber tracks with durable ABS molded sprockets the robot has excellent traction. It includes two 12vdc 50:1 gear head motors making it capable of carrying a 5lb payload. It is used as the base of the Lynxmotion Johnny 5 experimental robot platform.
MULTIPLE CONTROL OPTIONSAutonomous, semi-autonomous or RC control | The rovers are great for education, development or even semi-professional use. Use a programmable microcontroller like the BotBoarduino to create an autonomous sensor-based platform, or an RC remote for telepresence / remote video platform. |
QUALITY COMPONENTSAluminum, polycarbonate & metal gear motors | Tracked and wheeled rover frames use a combination of aluminum and polycarbonate plastic, making them relatively lightweight and durable. All-metal DC spur gear motors offer great value and have proven to be very reliable. |
EXPANDABILITYServo Erector Set Compatibility | Easily mount a pan & tilt, robotic arm, additional electronics and sensors to each platform. Most rovers incorporate the SES mounting pattern, allowing C-channels, brackets and SES compatible mechanics to be easily connected for customization. |
MULTIPLE CONTROL OPTIONS
Autonomous, semi-autonomous or RC control
The rovers are great for education, development or even semi-professional use. Use a programmable microcontroller like the BotBoarduino to create an autonomous sensor-based platform, or an RC remote for telepresence / remote video platform.
QUALITY COMPONENTS
Aluminum, polycarbonate & metal gear motors
Tracked and wheeled rover frames use a combination of aluminum and polycarbonate plastic, making them relatively lightweight and durable. All-metal DC spur gear motors offer great value and have proven to be very reliable.
EXPANDABILITY
Servo Erector Set Compatibility
Easily mount a pan & tilt, robotic arm, additional electronics and sensors to each platform. Most rovers incorporate the SES mounting pattern, allowing C-channels, brackets and SES compatible mechanics to be easily connected for customization.
OTHER INFORMATION
Assembly Guide
Illustrated assembly guides, manuals and tutorials for Lynxmotion’s wheeled and tracked rovers
Sample Code
Sample code for Lynxmotion rovers which use the BotBoarduino microcontroller and PS2 remote control system.
Electronics Guides
Information about the suggested electronics including the Sabertooth dual motor controller, BotBoarduino microcontroller, Lynxmotion PS2 Style Controller and more.
3D CAD Models
Several user-generated files of parts of the rovers
Videos
See the A4WD1 Original Rovers, Tri-Track and more in action
Images
Browse images of the various rovers with and without additional parts for customization
PHOTOS









FEATURED PRODUCT

A4WD1 Rover Kit
This is a basic A4WD1 which includes the frame and hardware, motors, hubs and wheels. It’s up the the user to add additional electronics like the motor controller, battery and control method.

A4WD1 - RC Kit
The A4WD1 RC kit includes everything needed to remotely control the rover, except for a battery and charger. There are spare RC channels should you want to add additional functionality.

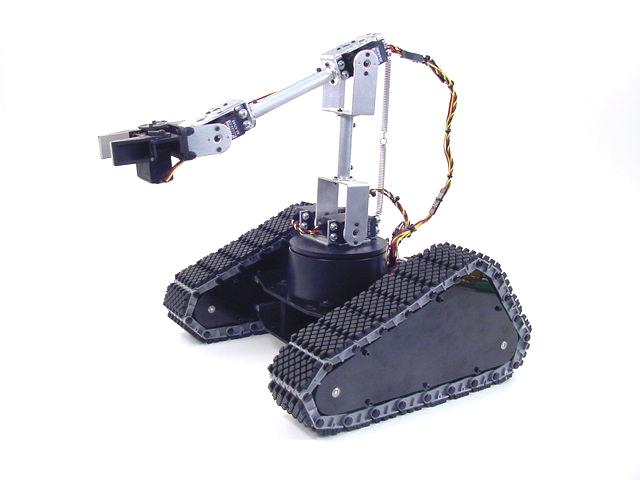
A4WD1 MTS (RC)
The tracked version of the A4WD1 uses Lynxmotion’s Modular Track System (MTS) to more evenly distribute the weight of the rover, adds traction and better climbing ability.

Tri-Track Chassis
The Tri-Track Robot Kit is a robust chassis for RC or autonomous robot experimentation. The chassis is designed for the BotBoarduino and/or the SSC-32 with room to spare.