15 - Software
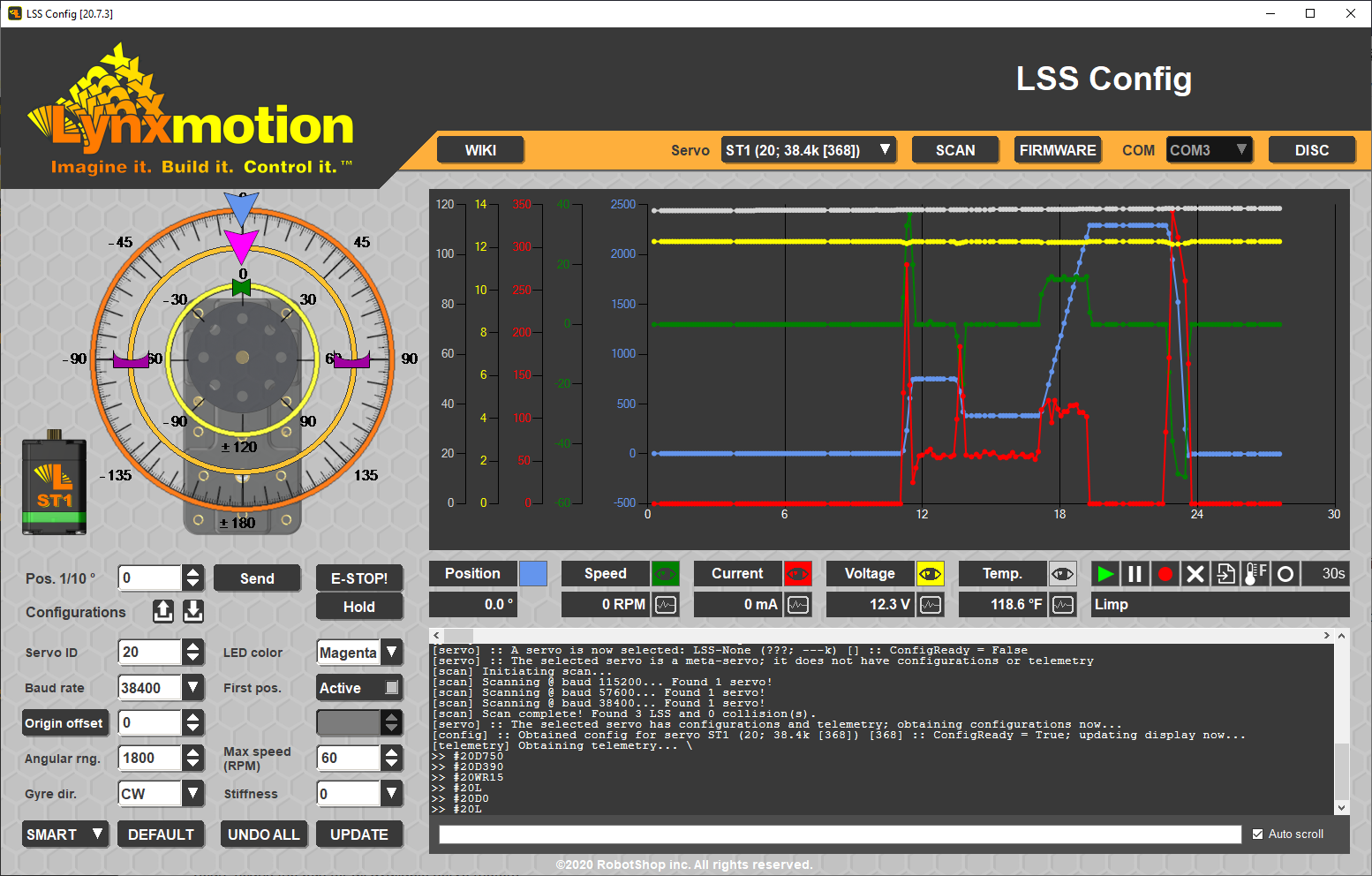
| The Lynxmotion (LSS) - Configuration Software provides easy access to viewing and modifying of the various settings that control the main features and functionality of the Lynxmotion Smart Servo Motors as well as allowing firmware updates. |
|
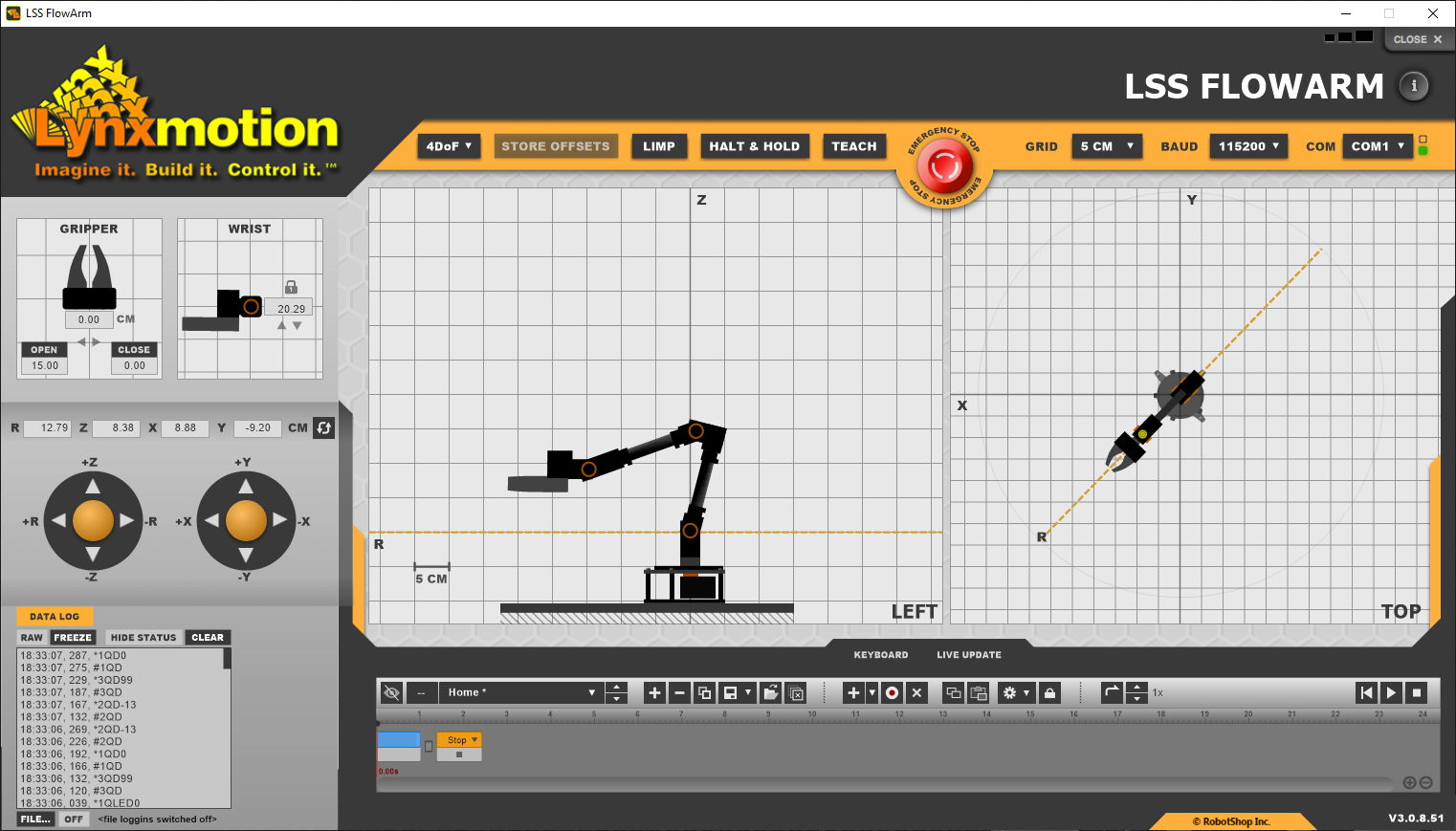
| The Lynxmotion (LSS) - LSS FlowArm App (download) application is intended to allow easy control of the standard Lynxmotion (LSS) - 3 DoF Robotic Arm (Kit) & Lynxmotion (LSS) - 4 DoF Robotic Arm (Kit) . The graphical interface shows multiple views of the arm which can be controlled via drag and drop, as well as by manually inputting coordinates. |
|
| FlowARM PLTW is a graphical interface which provides the user with complete control over the Lynxmotion AL5D robotic arm, both offline and in real time. The user is presented with multiple views of the arm, allowing the user to click and drag the arm to the desired location while the software takes care of all inverse kinematics equations. |
|
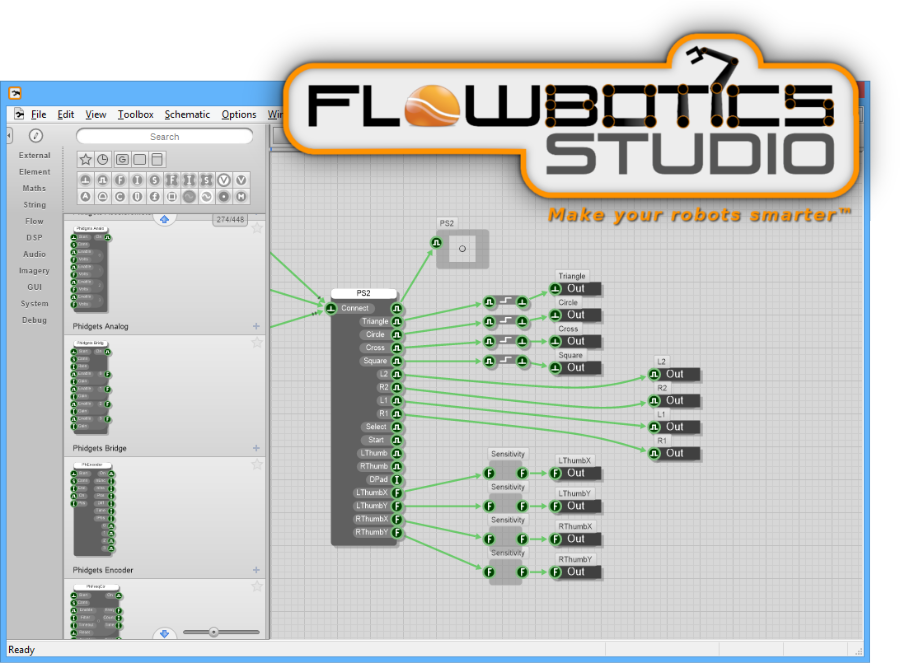
| FlowBotics Studio is a development platform for robotics software: it boasts the powerful FlowBotics graphical programming language, and includes many demo robotics projects to get you started. It can be used to control just about any robotics platform, data acquisition board, motor controller, servo board, sound card, or webcam. |
|
| Quadrino FCT (Firmware Configuration Tool) The Quadrino FCT (Firmware Configuration Tool) is developed for the Quadrino series of flight controllers. The need for modifying the code to load the Multi-Wii on the Quadrino is eliminated by this advanced software. This high-end software offers a comprehensive solution for setting up the flight controller. |
|
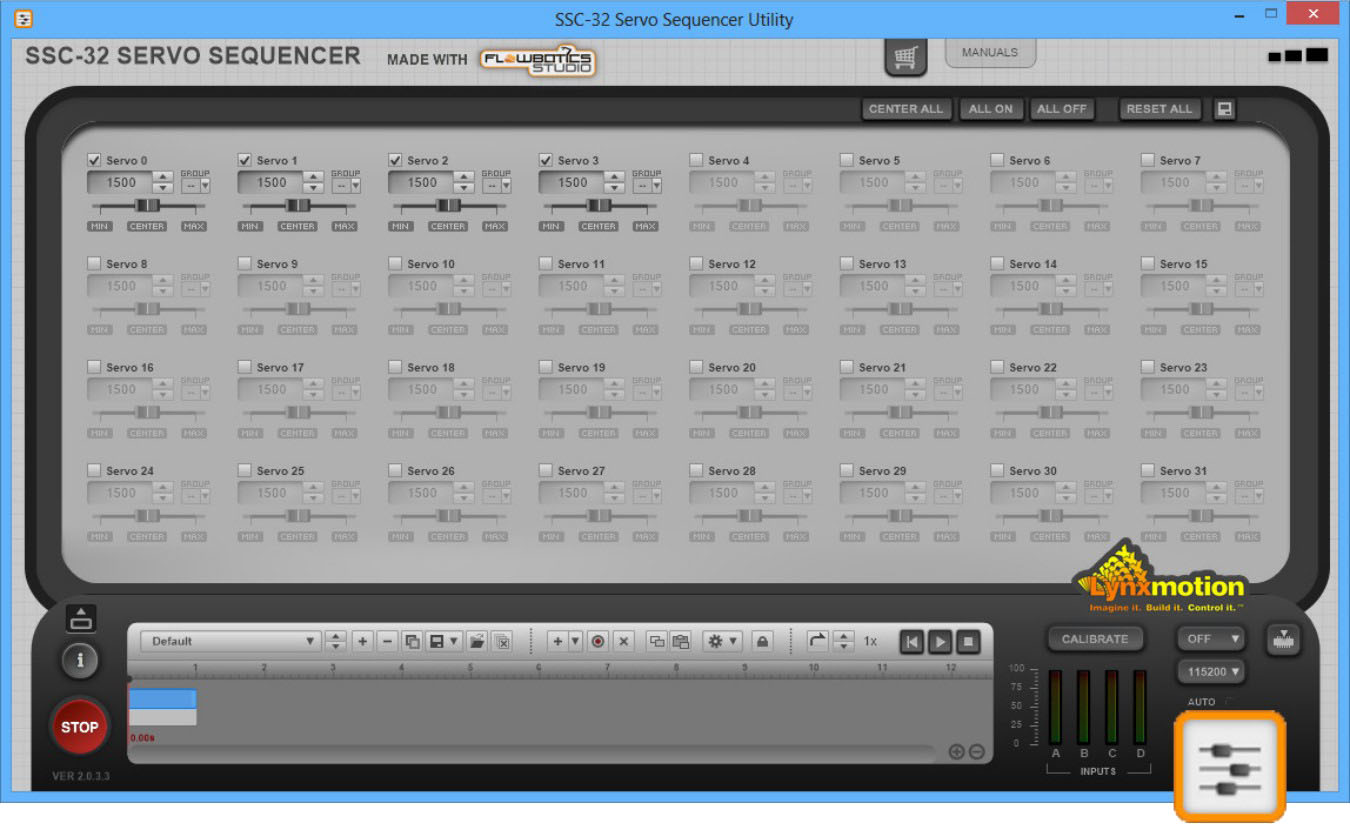
| SSC-32 Servo Sequencer Utility The SSC-32 Servo Sequencer Utility makes it easy to control the Lynxmotion SSC-32 Servo Controller and experiment with servo-based robotics and animatronics. It also enables you to move standard R/C servo motors individually, calibrates their position, store and playback motion sequences, upgrade the SSC-32 firmware and more. |
|
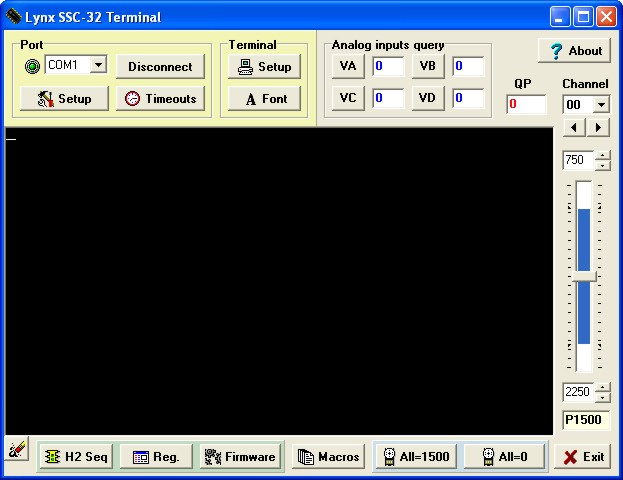
| LynxTerm is a free downloadable utility, it makes it easy to quickly test all functionality of the SSC-32 Servo Controller. |  |