
Phoenix Excel for SEQ-01
Last modified by Eric Nantel on 2023/01/26 14:51
|
|
|||||||
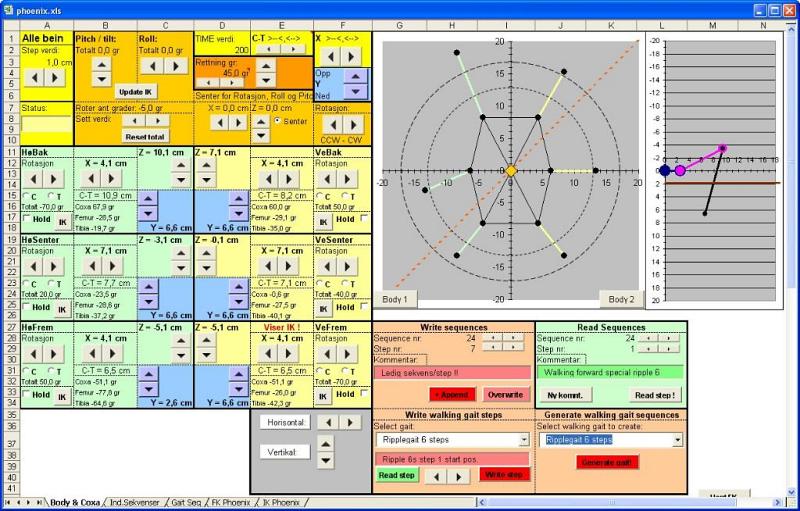 PEP screen 1 |
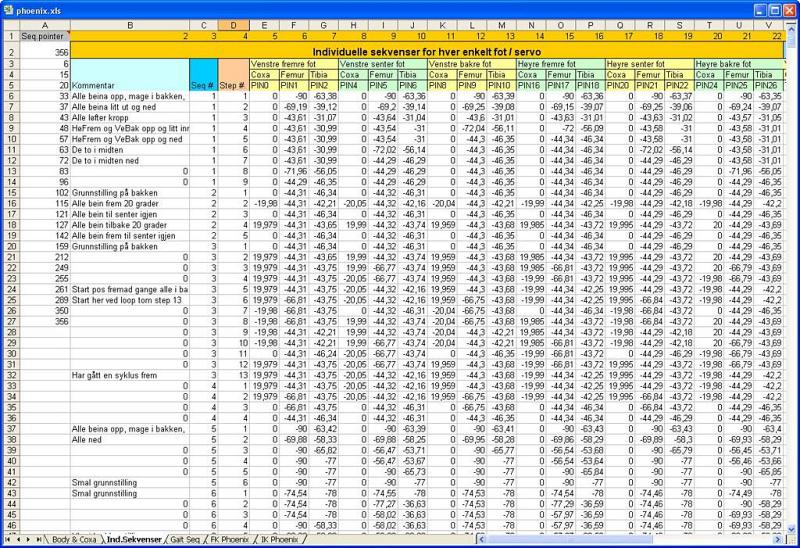 PEP screen 2 |
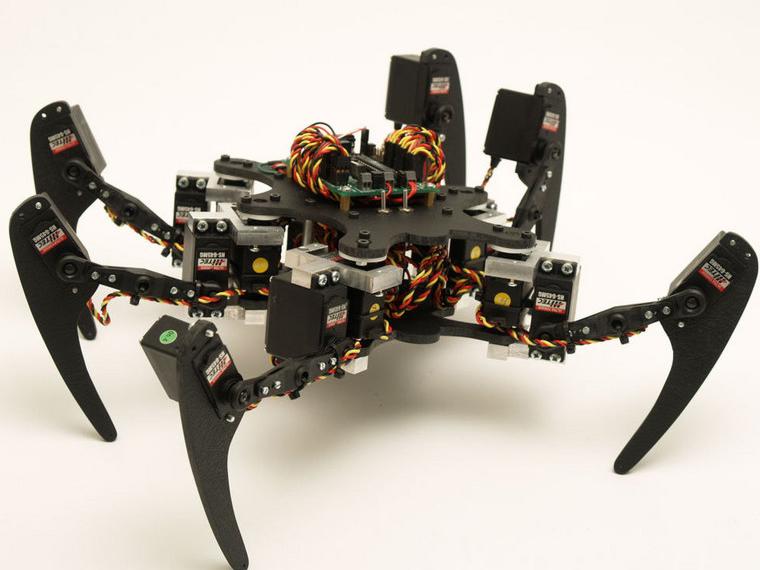 Phoenix standing |
 Phoenix compact |
||||
|
|
|||||||
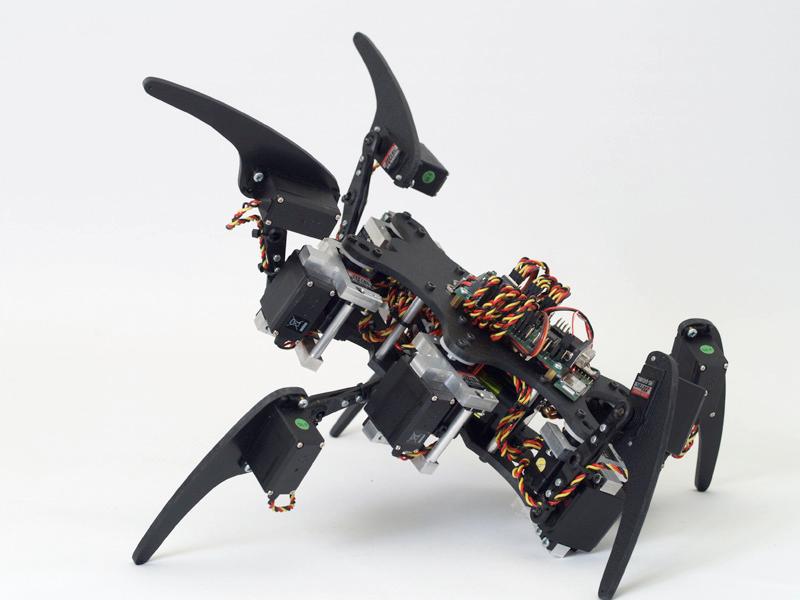 Phoenix attack side |
 Phoenix attack front |
||||||
Project Name: Phoenix Hexapod Author: Kåre Halvorsen (aka Zenta) |
|||||||
Phoenix is a hexapod robot with 3DOF per leg. Hardware consists of SSC32, 18 servos and BlueSMIRF bluetooth interface. Software on PC is Visual Sequencer and a MS Excel spreadsheet I’m calling PEP (Phoenix Excel Program). PEP take cares of forward and inverse kinematics and body rotation along all axes. It is possible to easy define direction of walking and define center of rotation. Ex. you can define center of rotation at the center of left forward tars (foot). But the most important thing is that it’s possible to create sequences and walking gaits that you can copy into a .csv file and import it to the Visual Sequencer. You can download PEP (Phoenix Excel Program) and the manual here:
|
|||||||