BH3 3DoF Body Assembly Instructions v1.0
Last modified by Eric Nantel on 2023/01/27 13:57
| BH3
Body Assembly Instructions Rev. 1.
Updated 02/05/2007. Safety first! Wear eye protection and never touch a powered robot! The purpose of this guide is to construct the chassis, attach the legs, and install the electronics. As long as the servo horns have not been removed from the servos, you do not have to center them during the assembly process. |
 Image of completed Robot. |
||||
| Step
1. Use twelve 4-40 x 3/8" hex socket screws to attach the spacers to the bottom of the top of the robot.
|
 Figure 1. |
||||
| Step
2. Slide the end panels in as shown. Mount the panel with the servo hole as the front. The panel with the switch holes should be the back. |
 Figure 2. |
||||
| Step
3. Mount the bottom of the robot using twelve 3/8" hex screws.
|
 Figure 3. |
||||
| Step
4. The SSC-32 should be configured for 115.2 kbaud and DB9 communication, with the VL=VS1 and VS2=VS1 jumpers installed. Consult the SSC-32 manual if needed. Attach the wiring harness to VS1. Connect 8" of 24awg wire (not included) to VS2; this will provide power for the Bot Board. Make sure that the red wires go to (+) and the black wires go to (-). Use four 3/8" hex screws to attach four 3/4" nylon hex spacers to the SSC-32 as shown.
|
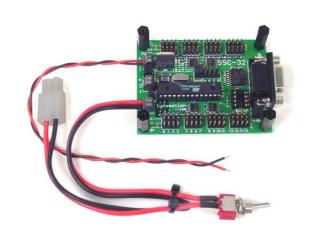 Figure 4. |
||||
| Step
5. Install the Atom 28 as shown, taking care not to damage the delicate pins. Make sure that the ABC buttons / LED jumpers are removed. Install the following jumpers: VS=VL, speaker enable, VL to I/O 4-7 bus. Consult the Bot Board manual if needed. Use four 3/8" hex screws to attach four 3/4" nylon hex spacers to the Bot Board as shown.
|
 Figure 5. |
||||
| Step
6. Slide the SSC-32 in from the top, orient as shown with the DB9 connector toward the front, and attach using four 3/8" hex screws.
|
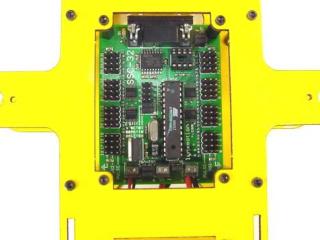 Figure 6. |
||||
| Step
7. Attach the power wires from the SSC-32 to the Bot Board's VS input as shown. Make sure the red wire goes to (+) and the black wire goes to (-). |
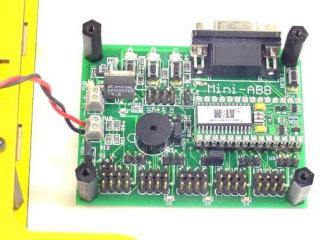 Figure 7. |
||||
| Step
8. Slide the Bot Board in from the top, orient as shown with the power terminals toward the rear, and attach using four 3/8" hex screws.
|
 Figure 8. |
||||
| Step
9. Attach the legs as shown, making sure to use right or left legs as indicated. Use twelve #2 x .250" tapping screws.
|
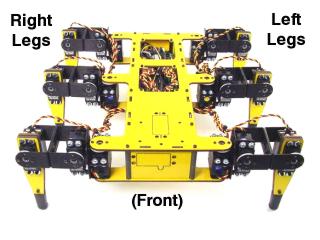 Figure 9. |
||||
| Step
10. Plug the servos into the SSC-32 as illustrated in Figure 10. Simply plug in the servo associated with the function to the corresponding pin. If oriented correctly, the I/O port (group of four pins) will be closest to its corresponding leg. |
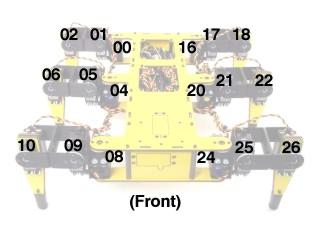 Figure 10. |
||||
| Step
11. This completes the mechanical assembly. You can now move on to the Complete H3/H3-R Tutorial. |
Figure 11. |
||||