BRAT Biped Autonomous Water Bottle Attacking Tutorial
| Biped BRAT Autonomous Water Bottle Attacking Tutorial.
Updated 03/27/2012 Safety first! Wear eye protection and never touch a powered robot! Note: This tutorial uses the Bot Board II, BASIC Atom Pro 28, and a Sharp GP2D12 sensor. Software: |
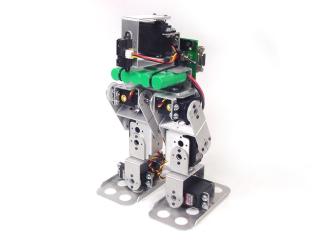 Image of Biped BRAT. |
||||||||||||||||||||
| Step 1. Depending on how you've built your BRAT, you may have to change the orientation of the "U" channel to match Figure 1. |
|
||||||||||||||||||||
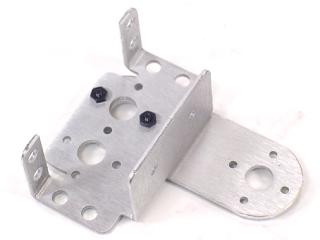
| Step 2. Attach an ASB-18 to a multi-purpose bracket as shown in Figure 2 using the included hardware. |
|
||||||||||||||||||||
| Step 3. Attach a long "C" bracket to the multi-purpose bracket as shown. Refer to Figure 3-1 for detailed information.
|
|
||||||||||||||||||||
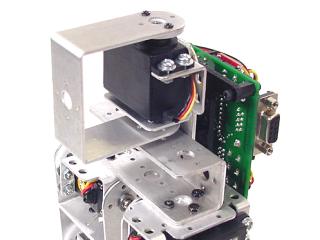
| Step 4. Attach the pan assembly and electronics carrier to the "U" channel as shown. Refer to Figure 4-1 for detailed information.
|
|
||||||||||||||||||||
| Step 5. Insert the pan servo into the assembly and secure with servo attachment hardware and two #2 tapping screws. |
|
||||||||||||||||||||
| Step 6. Attach the Bot Board II to the electronics carrier as shown, using four 1/4" hex socket cap screws. |
|
||||||||||||||||||||
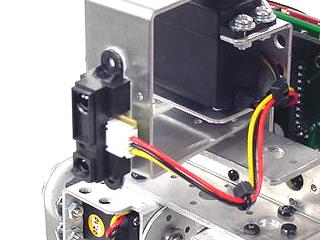
| Step 7. Using double-sided tape, attach the GP2D12 sensor to the front of the pan Long "C" bracket as shown. Make sure to orient the sensor as shown in Figure 7. |
|
||||||||||||||||||||
| Step 8. Make sure your servos and sensor are plugged into the appropriate channels, as shown in Table 8. *Note, P9 is used by the speaker, so we can't plug a servo in there. |
|
||||||||||||||||||||
| Step 9. Make sure the Bot Board's jumpers are set according to Table 9. Refer to Figure 9 for help with jumper settings. *Note, the VS to AX0 jumper enables the program to monitor the servo battery voltage. When the battery is low, the robot can beep in warning. |
|
||||||||||||||||||||
|
|
|||||||||||||||||||||
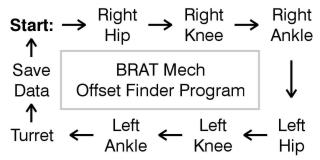
| Step 10. Download and install the BASIC Micro Studio. Download the BRAT Mech Servo Offset Finder program, and load it into the IDE. Program the Atom Pro, and follow these instructions to find your robot's offsets.
Note, if you have the Speaker enabled, when you press the B button you will hear a short tone. The tone will raise in pitch when you change from servo to servo, and will lower in pitch and be longer when you get back to Start. |
|
||||||||||||||||||||
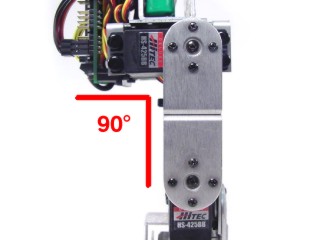
| Step
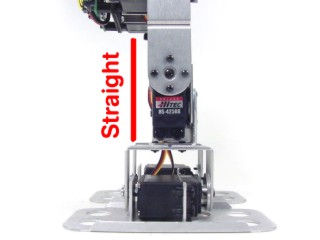
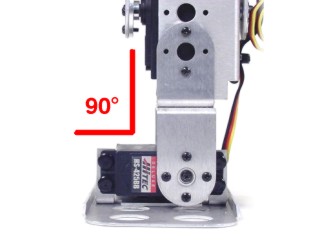
11. Place the robot in a position as close to neutral as possible, and turn it on. Your robot should go to and hold the neutral position, and should resemble figures 11-1 through 11-3. If the joints are off by more than 15° you may have made an error in assembly. To correct this, remove the center screw from the round servo horn, pull the servo horn off the servo, rotate until it's aligned, then reattach the servo horn. Use the A, B, and C buttons to straighten the BRAT as shown in Figures 11-1, 11-2, and 11-3. Note, if you are building the robot with HS-422 servos, you will notice the hip servos oscillate if the robot is lifted off the ground. This is normal, and is due to the lower power servo. When the robot is walking, the effects are minimal. Using a voltage that is higher than 6vdc will make the oscillations worse. When building a robot with more powerful servos such as HS-475, HS-485, or HS-645, you will not see this effect. After you've cycled through the servos and adjusted them to match Figures 11-1 through 11-3, pressing the B button again will save your servo offset values to the Atom Pro's EEPROM. |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||
| Step
12. Now download the BRAT Autonomous Water Bottle Attack Code, load it into the IDE, and program your BRAT. Your BRAT will now seek out an object in range, and once it gets close enough, it will kick the object. When you turn the robot on, it will beep three times, letting you know that the program was successfully downloaded. The BRAT will then scan the area in front of it, looking for a water bottle (or similar object). If the BRAT does not detect an object, it will turn in place, then scan again. This will repeat until the BRAT detects an object. When the BRAT detects an object, it will walk toward the object, turning to adjust the direction if needed. Once the BRAT is in "kicking range", it will beep. The BRAT will align itself into kicking position, then kick the object. After kicking, the BRAT will scan to make sure the object is down. After the object has been kicked down, the BRAT will once again start scanning for objects, starting the program loop over. |
|||||||||||||||||||||